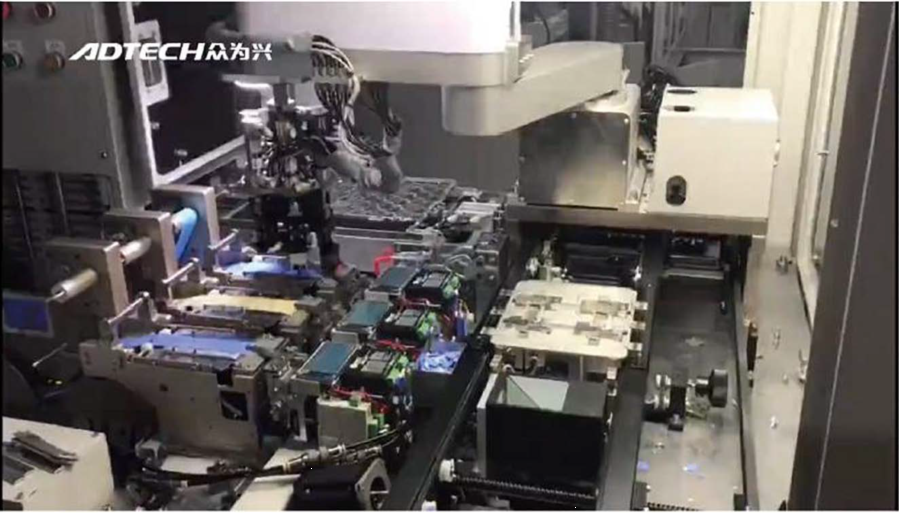
项目概况:AR6520机器人搭配AVS双视觉系统进行飞拍装配。
工艺流程:机器人进行固定位置多工具取料,机器人运行至倒装相机上方Z轴高速旋转飞拍纠偏,J2轴相机识别安装位置后进行装配。
应用精度:土0.04mm。
运行节拍:6-10S/套
设备优势:整线效率节拍提高3.5%
节省工位人员3人,1年回收成本,设备使用年限3年以上。 整机设备精度高,设备可靠性高,产品良率提升2%。

免费店铺在线升级
项目概况:AR6520机器人搭配AVS双视觉系统进行飞拍装配。
工艺流程:机器人进行固定位置多工具取料,机器人运行至倒装相机上方Z轴高速旋转飞拍纠偏,J2轴相机识别安装位置后进行装配。
应用精度:土0.04mm。
运行节拍:6-10S/套
设备优势:整线效率节拍提高3.5%
节省工位人员3人,1年回收成本,设备使用年限3年以上。 整机设备精度高,设备可靠性高,产品良率提升2%。
特别提醒:本页面所展现的公司、产品及其它相关信息,均由用户自行发布。
购买相关产品时务必先行确认商家资质、产品质量以及比较产品价格,慎重作出个人的独立判断,谨防欺诈行为。